With the rapid expansion of China's urban scale, the demand for intelligent transportation systems (ITS) is becoming more and more urgent. Automatic license plate recognition technology is widely used in red light vehicle monitoring, parking lot management, electronic toll collection systems and other fields. The complete license plate recognition system is generally divided into three parts: license plate location, character segmentation and character recognition. The license plate location technology is the core of the entire license plate recognition system, which directly affects the speed and accuracy of the entire recognition system.
At present, there are many license plate location algorithms, including edge detection, mathematical morphology, wavelet analysis, projection method, color feature extraction and neural network. Based on the methods of edge detection, mathematical morphology and wavelet analysis, the positioning is more accurate, but it is easy to generate incorrect positioning in images with complex background information or engine cooling holes above the license plate. The projection method is faster, and it is difficult to distinguish the license plate text from the lamp area, so the accuracy is low. The method based on color feature and neural network is accurate, but the operation speed is slow, and it is greatly affected by weather, illumination and license plate wear.
Due to the obvious limitations of the above various methods, an algorithm for integrated edge detection, mathematical morphology, color features and projection method is proposed. The centroid sorting removes the interference of the engine vents and other marginal rich areas, and passes through the valley. Value analysis complements the license plate area. The experimental results show that the method overcomes the shortcomings of various positioning methods in the past, which not only improves the accuracy of positioning, but also ensures the real-time and robustness of positioning.
1 rough positioning of license plate recognition
1.1 Edge Detection and Mathematical Morphology Processing Because the amount of information enriched in colored license plates is too large and the interference is strong, it is not suitable for direct analysis. Therefore, color RGB images are often converted into grayscale images for processing. The license plate area to be positioned contains more characters and has a rich margin. The amount of edges in the body background is small and not dense. Therefore, the grayscale image can be preprocessed by the edge detection method.
Since the edge is a place where the gray scale changes sharply on the image, the differentiation is obtained at the point where the gray level is changed, and thus the protrusion value is obtained. Therefore, the derivative of the gray level can be mathematically used to represent the edge. In practice, edge detection operators are often used. The commonly used edge detection operators are Sobel operator, Prewitt operator, Roberts operator and Canny operator. In this experiment, the Sobel operator is used to detect horizontal edge components and vertical edge components simultaneously.
The basic idea of ​​mathematical morphology is to use "structural elements" to collect image information. Structural elements can be used as probes. When the probe moves through the image, the relationship between the various parts of the image can be examined to understand the structural features of the image. The algorithm is:
1) Perform a mathematical morphology closure operation: it can be simply defined as first expansion and then corrosion. Closed operations typically connect narrow gaps to form elongated bends and fill holes smaller than structural elements. This makes it possible to connect adjacent objects and to smooth the boundary without significantly changing the area of ​​the object.
The closed operation is defined as: ![]()
The experimental structure is shown in Figure 1 and Figure 2.
This article refers to the address: http://

2) The mathematical morphology calculation operation can be simply defined as corrosion first and then expansion. After the operation, the object area that cannot contain the structural elements is completely deleted, the outline of the object is smoothed, the narrow connection is disconnected, and the small protruding parts are removed.
The open operation is defined as: ![]()
The experimental structure is shown in Figure 3.

1.2 Centroid location and color judgment of the candidate area There are many traditional treatment methods for the selected area, including area sorting, aspect ratio sorting and color recognition.
1) Area sorting Since there is no guarantee that the edge component of the license plate area is the most abundant. When there are many patterns on the car body, or the texture of the car lights is more obvious, the interference to the positioning accuracy is very large.
2) After the mathematical morphology processing of the aspect ratio ordering, more areas that meet the aspect ratio characteristics of the license plate are often introduced. Moreover, when the license plate angle is deviated, the accuracy of the aspect ratio determination is significantly reduced.
3) Color recognition In most cases, the license plate can be identified, but when the car body has a rich pattern and the color is similar to the color of the license plate, the accuracy of color recognition is greatly reduced.
For most cars, the license plate is basically at the bottom of the vehicle, and the lower part of the license plate does not have a lot of text or graphics like the body, which brings interference to the identification. Its form is relatively simple, which brings great convenience to the identification. At the same time, because the ground is single, the amount of interference is even smaller. Therefore, a way of bottom-up detection of candidate regions can be employed.
However, it should also be noted that the lights are often parallel to the license plate area, and the amount of edges is also very rich, so the interference is relatively large. Considering that the lights are mostly red, white or transparent, and the color of the license plate is quite different, color recognition can be used to distinguish the license plate area from the headlight area. Therefore, this experiment uses a combination of centroid detection and color recognition. The ordinate of the centroid of the selected area is first sorted and detected from the bottom of the image.
First, each pixel in the candidate region is converted from the RGB model to the HSV model, namely Hue, Saturation, and Value. As a result of the direct conversion to the HSV model, the result of uniform quantization results in a huge amount of quantized data. In the license plate recognition, only a certain number of colors need to be identified, and it is not necessary to distinguish the various colors in detail, and the quantization is too fine, which may cause ambiguity in color judgment, resulting in distortion of the result. Therefore, a non-uniform quantization method can be employed to reduce the quantization level and improve the calculation efficiency. At the same time, non-uniform quantization can also classify similar colors into the same color, greatly reducing the complexity of the algorithm. The chromaticity is divided into 16 levels, and the saturation and intensity are divided into 3 levels. The algorithm process is:
1) Statistics on the H, S, and V values ​​of each pixel in the candidate region;
2) Find the maximum points H_max, S_max, V_max of the three variables H, S, and V, and these eigenvalues ​​can represent the color feature information of the entire region;
3) The algorithm for color judgment is 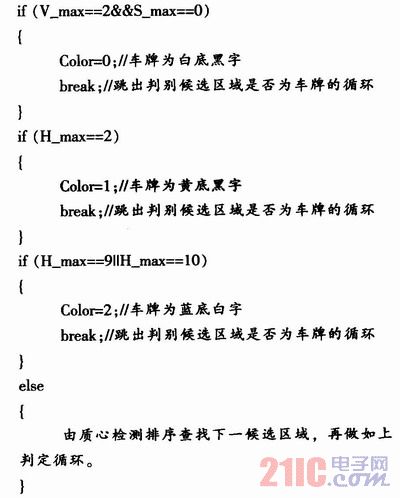
The experimental results show that the recognition accuracy of the algorithm is higher than that of the traditional algorithm, and it can accurately identify vehicles with a lot of pattern interference. The centroid position detection can eliminate the interference of the body pattern and the sign with the color similar to the license plate. Color recognition eliminates interference from lights, bumpers, etc. located near the license plate.
2 fine positioning of license plate recognition
2.1 Vertical Projection In the candidate area of ​​coarse positioning, there are often errors and errors. Most of the mistakes are caused by text ads, warnings, etc. in the lower part of the license plate. The error is mostly caused by the breakage of characters in the license plate recognition caused by factors such as low image clarity or underexposure.
To solve such problems, a vertical component projection method is employed. Selecting a grayscale image that can include a candidate region and a minimum region that is equal to the original image, and subtracting and then summing two adjacent pixel points by using the following formula, thereby obtaining a change of edge information on the column. Happening. 
After the projection values ​​of each column are calculated, a projection map of the candidate region can be made, as shown in Figs. 4, 5, 6, and 7.
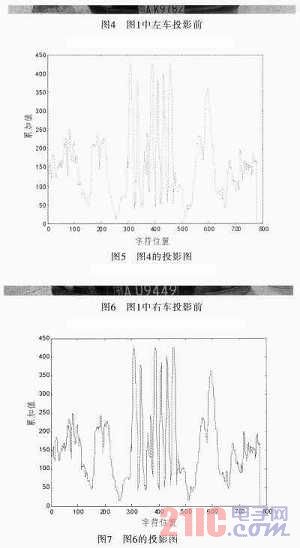
As can be seen from the projection, the area with characters has a distinct peak, and the characters are valleys. By alternately changing the peaks and valleys, the position and number of characters can be determined.
2.2 Fine positioning based on character spacing In the actual operation process, sometimes the selected area is composed of other characters, such as advertisements or character patterns, whose characteristics are too similar to the license plate characteristics, which makes it difficult for the general method to distinguish them. At this time, the number of characters can be judged by the method of detecting the number of valleys to distinguish the license plate from the character pattern. In addition, due to image exposure and the like, a break occurs at the character, and the license plate area becomes two candidate areas. Therefore, it is often only possible to output a part of the license plate, not all, at the final output. In order to solve the problem of character breakage, the valley tracking technique is adopted. That is, the valley value is detected from the centroid point to the left and right sides, and the number of valleys is counted. For an ordinary license plate, that is, 7 characters, there should be 6 valley points. When it is detected that it is indeed 6 valley points, the license plate is found. When the detection valley point is less than 6, the threshold is relaxed and the detection is continued until the valley point is 6. The specific operation process is:
1) Find the peak peak of the projected image and binarize the entire projected image. which is: 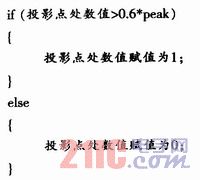
Thus, a binarized projection map can be obtained as shown in FIG.
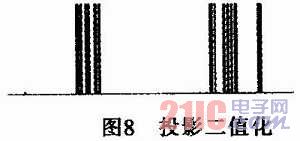
2) Detecting from both sides of the center of mass. 1 value as the starting point, when it is detected that the next point is also 1, continue to detect the next point; when the next point is detected as 0, num_zero=num_zero+1, and then continue to detect the next len ​​points, if len If one of the points is 1, then use this point as a starting point to continue the test. If len points are all 0, the last value is the end of the license plate.
3) If num_zero=6, the license plate area is complete and jumps out of the loop. If num_zero<6, the threshold len_new=1.2*len is relaxed and then detected. Until len_new=2*len, if the loop has not yet jumped out, it means that the area is not the license plate area, and it goes to the upper loop to find the next candidate area.
The results show that under the fine positioning algorithm, the license plate recognition is more accurate, and only a few license plates have character breakage. The broken license plate image is because the license plate tail character is the number 1, and when it is used for differential projection, it is displayed as a valley value, so one character is missed. For this case, the final positioned license plate edge value is compared with the initial candidate region edge value, and if the projected edge value is less than 1 candidate character length of the candidate region, the tail character is considered to be subtracted in the differential projection. It can be added. The final output license plate image is shown in Figure 9:

3 Experimental results The image used in the experiment is 640×480 pixels and 256 grayscale images, among which the license plate includes a small civilian vehicle license plate (white on a blue background), a large civilian vehicle license plate (black on the yellow background), and a military license plate (black on white). ). The license plate occupies a different proportion of the size of the image, and the background is different. Some of the vehicle bodies have obvious character patterns and warning signs. In the 80 images of the centralized inspection, 77 were correctly detected, and one was missed. Misdetected 2 frames. The missing images are too serious for the license plate to fade, which causes the last few characters to be undetectable. The two pictures that are misdetected are because the bottom of the license plate has a slogan with colors and characters similar to the license plate, which cannot be distinguished from the license plate. This problem can be solved in the character recognition link after the license plate is located.
4 Conclusions The proposed algorithm combines centroid detection sorting, color discrimination and projection method for character tracking detection. The algorithm solves the interference of the upper part of the car body and the slogan and warning words on the license plate recognition through the method of centroid detection sorting: the color recognition eliminates the interference of the high edge characteristic area with the high edge characteristic area on the license plate area through the color recognition; The character tracking detection algorithm solves the problem of character breakage, defect, etc. in accurate license plate character positioning. The algorithm has high detection accuracy and strong anti-interference ability, which is feasible and effective in practical application.
Touchless Sensor-Makes it germ Free
Environment Friendly-Prevents Contamination
Ideal fit for Kitchen/Bathroom/Bedroom
As users hands or debris enter the zone 6 inches (15cm) from the infrared sensor on top of the dustbin, the lid will automatically open.
The Lid will remain open if hand or debris is within the 6 inch (15cm) range of the infrared sensor. Lid will close 7 seconds after users hands move away.
The new touch switch panel has higher stability and efficiency. you can use it effortlessly. There are [OPEN" & [CLOSE" buttons for manual operation, and there is a ON/OFF power switch on the back of the dustbin.
The new removable plastic rim is easy to lift out, and the plastic ring helps leave no excess plastic bag visible (w/o liner).
Two liners (30L+20L) for easy recycling
Features:
-100% [Hands-Free" operation.
-[Germ-Free"-Prevents cross-contamination
- Trash Bag Retainer Ring stops full, heavy bag from falling in and keeps bag ends neatly out of view
-Rubber feet keeps this trash can in place and protects floors from scratches
-Removable hard ABS plastic head for easy cleaning
-Uses 4 AA-Sized batteries 1.5V(LR6) (Not included)
-Low energy-consuming
-Multiple colors to satisfy your different requirements.
-Capacity:30L+20L
-Dimensions: 34W x 48 L x 64H CM
-1 Year Manufacturer`s Warranty included
Rectangular Sensor Automatic Dustbin 2-Compartment 30L+20L
Automatic Dustbin,Hand Sensing Dustbin,Hotel Dustbin,Environmental Dustbin
NINGBO ZIXING ELECTRONIC CO.,LTD. , http://www.zixingautobin.com